無人水上ボートOTTER



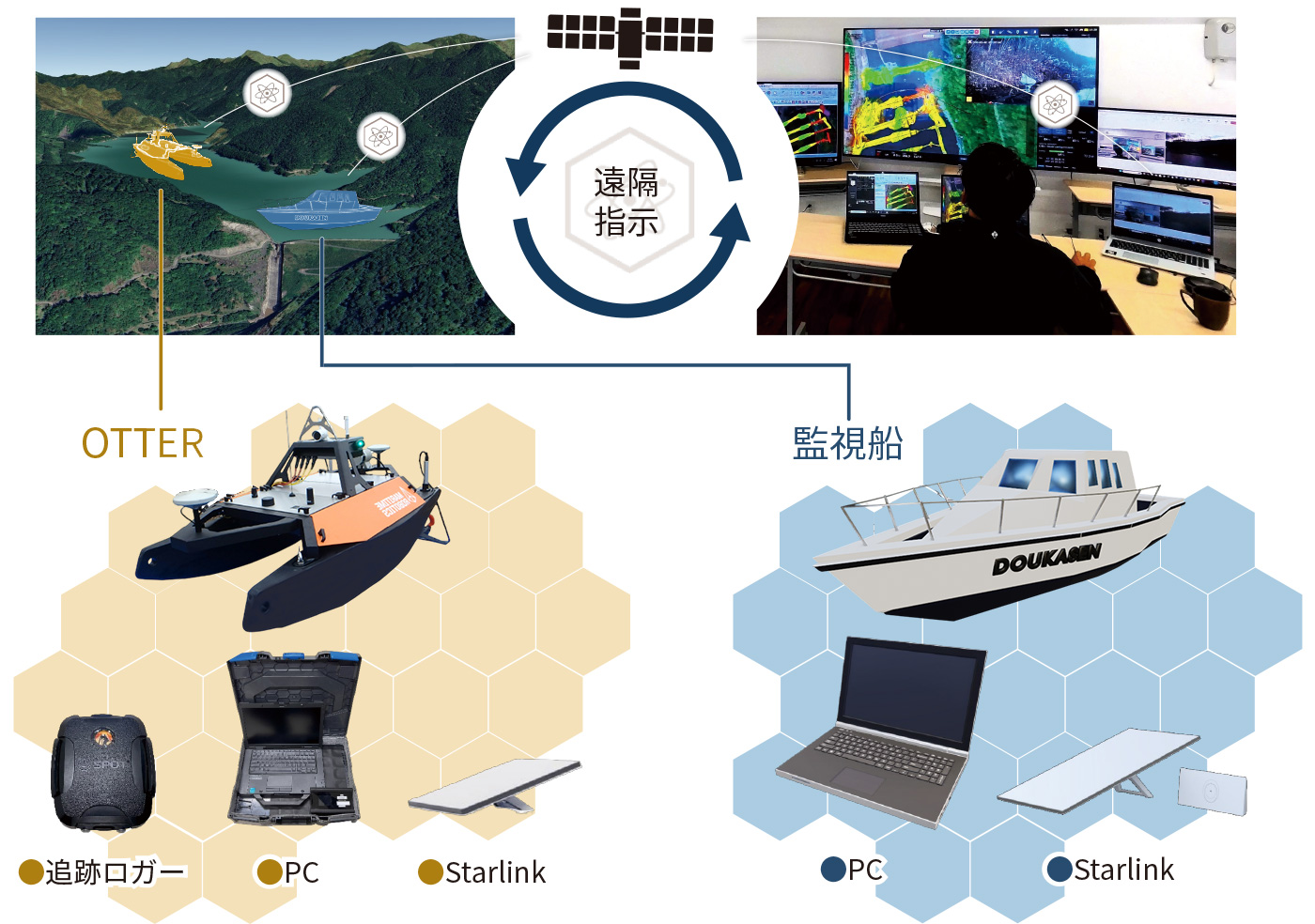
遠隔操作による無人ボートで水中を測る
遠隔操作による無人ボートで水中を測る
水中を測る
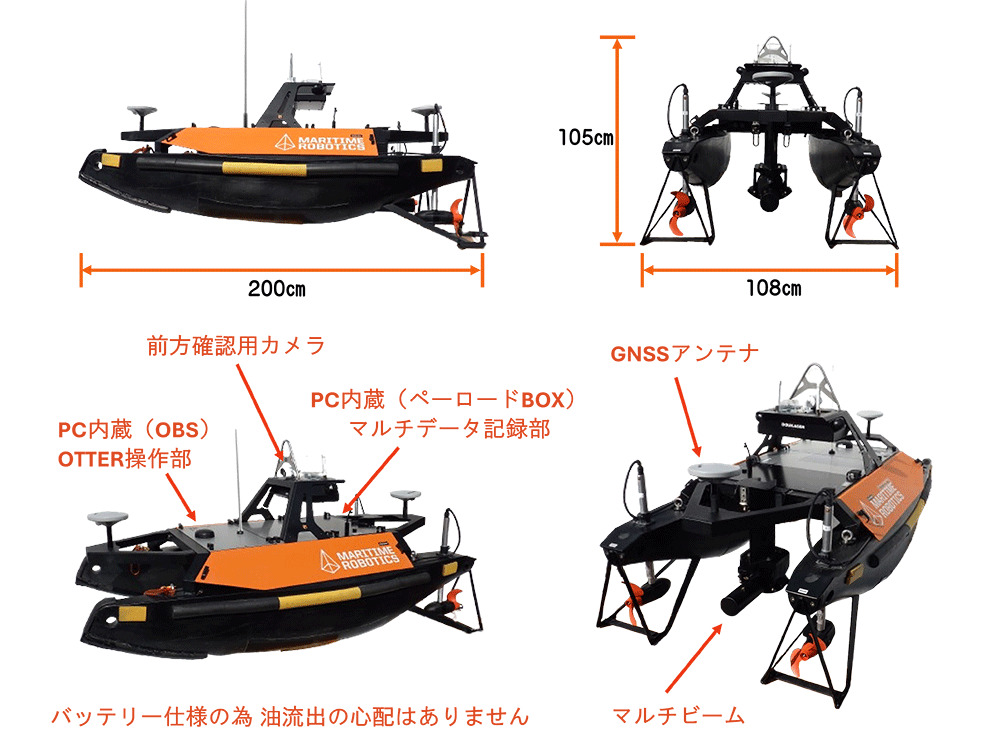
当社所有のマルチビーム「NORBIT」を装着し自船の位置をGNSSで把握することで、事前に計画した航行ルートを安全な場所から遠隔操作によって海底地形を把握することができます。
バッテリー駆動のため環境にも配慮し水上作業のリスクを排除しロボットによる自動深浅測量を可能とします。
無人水上ボートOTTER
自船の位置を自分で把握し計画通りに無人で計測するMaritime Robotics 社製のUnmanned Surface Vehicle(USV)です。
水上作業のリスクを低減し、高精度な水中地形データを提供する
ことが出来ます。遠く離れた現場でも会社から操作可能です。


仕様
無人水上ボートOTTER
- 機器メーカー
- Maritime Robotics社
- 機器名
- SUV System OTTER Pro MK3
- 寸法
- L 200cm × W 108cm × H 105cm
- 重量
- 最大95㎏
- 最大速度
- 6ノット(マルチビームソナー付4ノット)
- 動作電圧
- 30V DC
- 航続時間
- (バッテリ-2個)2ノット:10時間 3ノット:6.5時間
- ソフトウェア
- VCS(Vehicle Control Station)
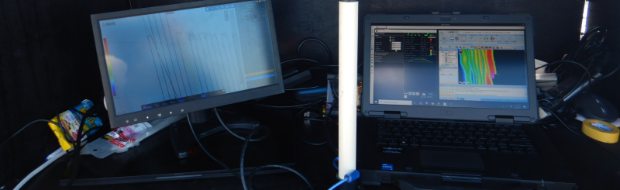
収録中の測深データを確認
Remote Control
遠隔操作
現場
オペレーションルーム

計測までの流れ
FLOW
OTTER
FLOW | 01
事前にマルチビームソナーを艤装し、接続確認や各種点検を行い現地で直ぐに稼働できる様に準備します。

OTTER
FLOW | 02
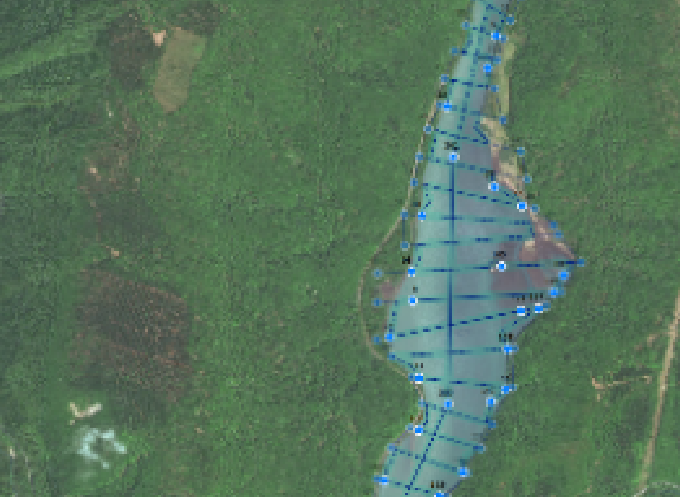
専用ソフトであらかじめ航走するルートを決めます。
浅瀬ポイントや計画測線をインプットしプロジェクトを作成します。
OTTER
FLOW | 03
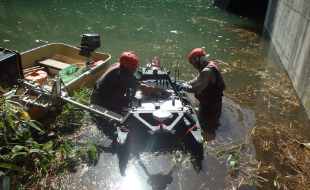
OTTERをハイエースに積んで現場に移動。

OTTER
FLOW | 04
OTTERを水面に運びWi-FiでPCと接続し各種設定や動作確認を行います。

OTTER
FLOW | 05
計測スタートします。Wi-Fi接続可能な距離ではベースキャンプで測深状況や前方カメラで状況確認が可能です。GNSSを受信し自船の位置を自分で判断しながらミッション遂行後、自動でベースキャンプに戻ってきます。